





- 223 高校采購信息
- 1316 科技成果項目
- 10 創新創業項目
- 0 高校項目需求
基于形狀記憶聚合物的一種新型的 “萬能抓手”策略


浙江大學航空航天學院宋吉舟教授團隊,便基于形狀記憶聚合物,提出了一種新型的“萬能抓手”策略。這個“萬能抓手”的載體非常簡單,就是一塊智能“塑料”。別瞧它結構簡單,本領可不小,它可以把目標物體“鎖”在體內,輕松地抓取1微米到1米大小之間任何形狀的物體。
目前這一研究成果已發表在知名學術期刊《科學進展》(Science Advances)上,文章共同第一作者為浙江大學航空航天學院碩士生令狐昌鴻和博士生張順,通訊作者為浙江大學航空航天學院宋吉舟教授。
宋吉舟教授團隊的“萬能抓手”何以做到“探囊取物”?靠的便是形狀記憶聚合物。形狀記憶聚合物是一種特殊的智能材料,論其特殊,就特殊在它的“逆來順受”:在外部刺激作用(如光、熱)控制下,形狀記憶聚合物可軟可硬,在受到一定的外力作用導致變形后,它就能保持這個變形后的形狀,可謂“順其自然”;然而在一定的外部刺激作用下,它又會變回原來的樣子。目前形狀記憶聚合物已經被廣泛用于智能織物、電子包裝管的熱收縮膜、航空器太陽能帆板展開機構、智能醫藥器件等領域。
宋吉舟教授團隊的新策略:第一步,就是抓取物體時,先在外部刺激作用下,讓形狀記憶聚合物變得柔軟,趁此機會將物體或者物體表面的結構嵌入其中;第二步,去掉外部刺激,讓形狀記憶聚合物變回剛硬的狀態,保持住該變形的臨時形狀,將物體“鎖住”,從而把物體抓取起來;第三步,等把物體轉移到目的地之后,再次施加外部刺激,形狀記憶聚合物就會恢復初始形狀,將物體“解鎖”釋放。
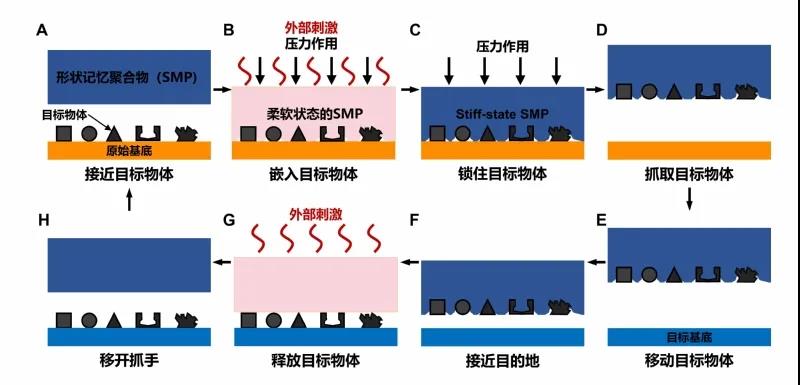
形狀記憶聚合物萬能抓手抓取和釋放物體的流程示意圖
形狀記憶聚合物這塊智能 “ 塑料 ” ,就好像是一把有魔力的萬能鎖,能鎖住世間萬物:為了獲取 “ 獵物 ” ,它 先 變成柔軟的橡皮泥,把物體柔柔地包住,然后變成堅硬的石頭,把物體牢牢地鎖住,等把物體 “ 押送 ” 到目的地,又會重新變成軟軟的橡皮泥并釋放物體。宋吉舟教授介紹,這把 “ 萬能鎖 ” 能在典型的三維結構物體上產生很大的抓力,包括球體、方塊、管狀物體、螺栓、螺母、棗核、鑰匙串等;更厲害的是,它還能像壁虎一樣, 粘附在物體表面 ,不論物體表面光滑還是粗糙。
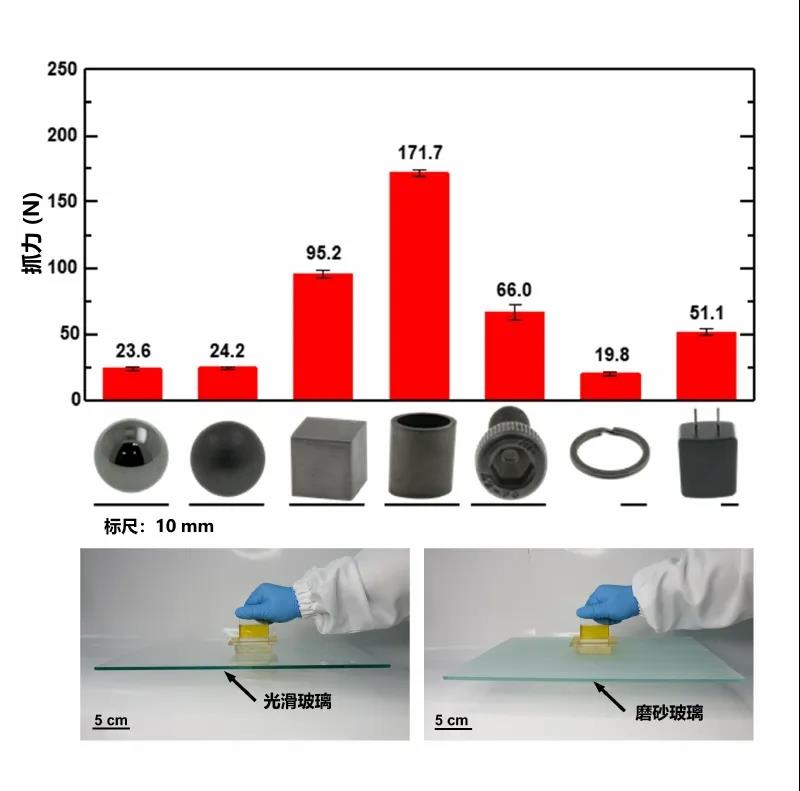
形狀記憶聚合物萬能抓手對典型宏觀物體的抓力
那么對于尺寸小的物體,這個抓手又是如何發揮功效的呢?當物體尺寸小到微觀尺度(100微米左右或者更小),物體受到的表面力,特別是與抓手的粘附作用強,會給物體的釋放帶來較大的挑戰。在該設計中,抓手通過把物體或者物體表面的結構鎖在其內部實現抓取,不依賴抓手的粘附力,所以當粘附力給物體釋放帶來挑戰時,就可以在抓手表面鍍上一層特殊材料,或者增加抓手表面粗糙度來減弱粘附,從而實現物體釋放。這樣,即使是75微米大小的不規則鐵顆粒或者是直徑10微米的二氧化硅球,也能順利從形狀記憶聚合物萬能抓手上得到釋放。
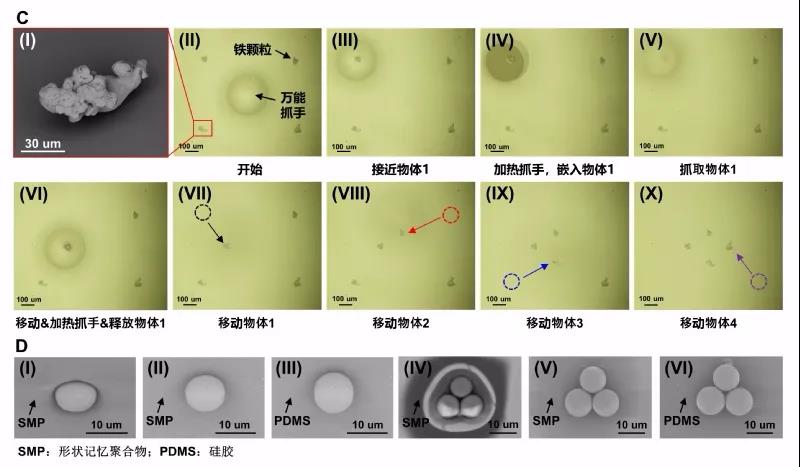
使用形狀記憶聚合物萬能抓手操縱75 微米的不規則鐵顆粒和10微米直徑的二氧化硅球
“微觀抓手就像微觀世界里的吊車,可以用它在微觀世界里搭建‘建筑’,制作特殊的光電器件。”令狐昌鴻說,“這個抓手在微觀視角下還有一個優勢,就是一個抓手就是數以萬計的微觀吊車,可以高效地在微觀世界工作。”
談及具體應用,宋吉舟教授表示,在柔性電子制備中,最重要的一步就是微觀元器件的快速組裝,即把制備基底上數以萬計或者更多的維納元器件轉移到柔性的使用基底上。以往的方法都依靠粘附來一次性抓取這些元器件,但是釋放的時候粘附就變成了限制因素。而宋吉舟教授課題組提出的這個策略,完全不依賴粘附,為柔性電子的制備提供了一種新思路,有望推進柔性電子的工業化進程。
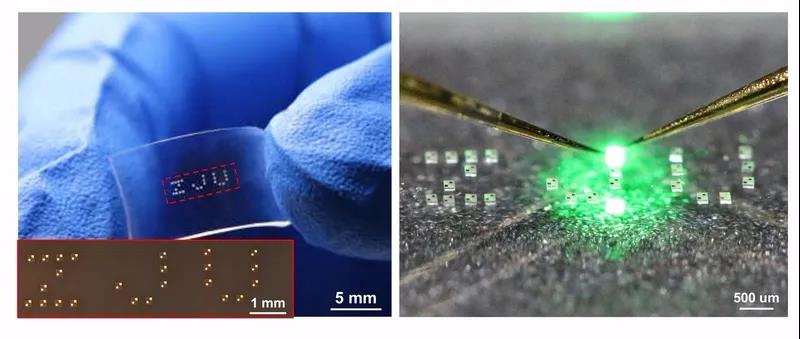
使用形狀記憶聚合物萬能抓手組裝柔性電子器件的簡單展示
該項目得到了國家973計劃、國家自然科學基金和中央高校基本科研業務費專項資金等的支持。

掃碼關注,查看更多科技成果