





- 18 高校采購信息
- 348 科技成果項目
- 1 創新創業項目
- 0 高校項目需求
仿生鷹眼視覺相機


1. 技術特點:
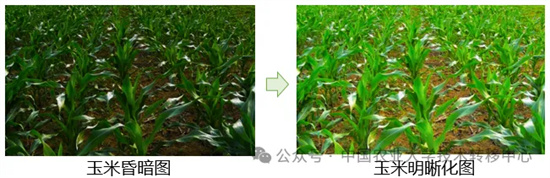
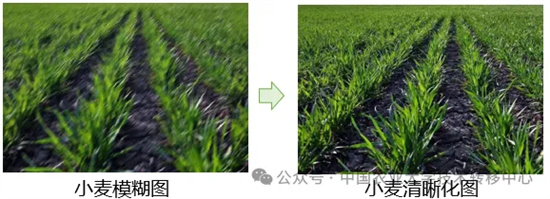
從結構仿生和功能仿生方面模擬鷹眼視覺結構和鷹眼視覺機制。結構仿生方面,模擬鷹眼雙中央凹大視場成像設計仿生鷹眼視覺相機,仿鷹眼相機具有大視場和高分辨率的特點,以解決傳統相機采集信息不全、采集效率低的問題;模擬鷹眼瞬膜和視桿細胞高質量成像,設計自動濾光片和自動補光燈,支持在正午陽光極強和夜間光線極暗環境下采集圖像。功能仿生方面,模擬鷹眼視覺神經中樞信息增強機制,設計防抖算法解決因風擾造成無人機抖動,導致相機采集視頻抖動的問題,以及基于維納濾波算法解決圖像模糊的問題;模擬鷹眼視覺自適應光適應機制設計鷹眼自適應光適應算法,解決因環境光線變化導致圖像亮度不均問題,實現高質量成像。同時,考慮對目標的精準測距,模擬鷹眼視覺光流精準測距機制,訓練DepthFM模型,提高深度相機測距的精準度。
2. 主要技術參數:
仿生鷹眼視覺相機由一個RGB相機,一個紅外結構光深度相機,一個補光燈,一個自動濾光片切換模組構成。采用全局快門感應器,單個RGB相機視場角達120°,輸出1280×720分辨率的深度畫面。配置RK3588芯片作為邊緣計算板卡主控芯片,該芯片具有“四核A76+四核A55”的八核CPU和ARM G610MP4 GPU,內置6 TOPs算力的NPU,算力滿足不同計算場景。


仿生鷹眼視覺相機屬于前沿仿生領域,在硬件和算法上均具有技術先進性。
1. 硬件先進性
仿生鷹眼視覺相機從結構上模擬鷹眼視覺結構,設計具有大視場、高分辨率特點的相機,克服傳統相機視場角小,采集范圍有限的缺點;同時,設計自動補光燈和自動濾光片,解決傳統相機無法全時段工作的缺點。最后,仿生鷹眼視覺相機集成于高算力邊緣計算板卡,滿足不同任務的計算需求。
2. 算法先進性
仿生鷹眼視覺相機從功能上模擬鷹眼視覺機制,融合仿鷹眼視覺感知算法,實現高質量成像。同時,具有目標檢測、全時段車牌識別、動態目標跟蹤、動態路徑規劃、三維點云信息重建等前沿算法,以滿足不同場景下的任務需求。
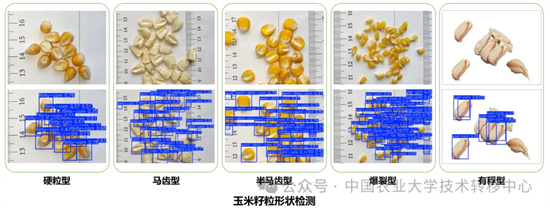
仿鷹眼產業化應用廣泛,可用至育種機器人(跨壟式無人車和涵道式無人機)作物表型監測、采摘無人機果實識別、高速ETC門架車牌識別,羊群動態監測和計數。
1. 具有廣泛應用場景
仿生鷹眼視覺相機可用至智慧農業(育種無人車、育種無人機,采摘無人機)、智慧畜牧業(放牧無人機)和智慧交通(高速ETC監控)等領域,具有廣泛的應用場景。
2. 具有大視場、采集效率高的特點
仿生鷹眼視覺相機模擬鷹眼雙中央凹大視場成像,具有120°大視場,在單次采集圖像任務中,獲得更多的目標信息,圖像采集效率高。
3. 融合前沿仿生感知算法
仿生鷹眼視覺相機融入前沿仿生感知算法,可設置不同場景的解決方案。如模擬鷹眼自適應光適應機制設計鷹眼自適應光適應算法,克服圖像光線變化對高質量成像的影響;模擬鷹高分辨率成像機制重建果園三維點云信息,以及模擬鷹眼視覺注意機制完成動態路徑規劃等任務。

掃碼關注,查看更多科技成果