高等教育領域數字化綜合服務平臺






西安電子科技大學
教育部
- 16 高校采購信息
- 179 科技成果項目
- 1 創新創業項目
- 0 高校項目需求
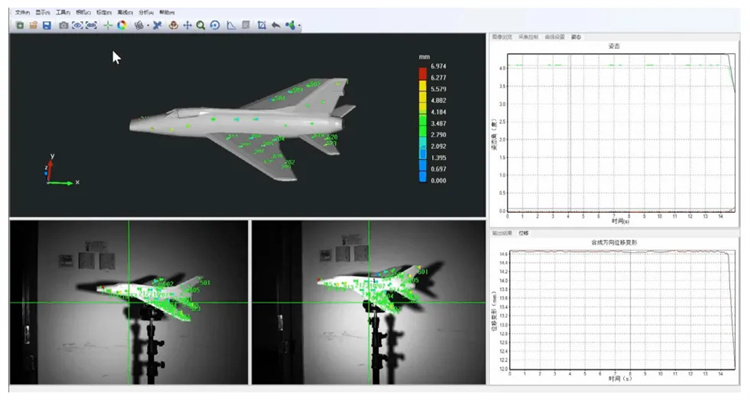
光學三維位姿在線監測系統 -DigiAMS


所屬領域:
項目成果/簡介:
視覺位姿測量技術在飛行器結構強度試驗、飛行軌跡姿態測量中扮演著重要角色。通過視覺位姿測量技術獲得飛行器在試驗過程中的精確位置和姿態信息,并與其他試驗數據,如載荷數據和應變數據等相結合,可以對飛行器的結構進行綜合分析和評估,有助于揭示飛行器結構的強度瓶頸、預測疲勞壽命,并為改進設計和制造過程提供指導。本項目研究了基于CAD模型的物體三維位姿實時測量技術,實時解算出物體上包括質心在內的物體上任意一點的位置(三維坐標)及姿態(巡航角、滾轉角、俯仰角)。
針對現有視覺位姿檢測技術存在的標定操作過程復雜、現場測量基準構建難、實時性差及受遮擋影響大等問題,發展一種基于視頻圖像融合技術的復雜工況大視場相機柔性標定技術,實現有限空間內雙目相機的快速、準確標定,提出一種基于CAD模型的測量基準坐標系構建方法,實現相機坐標系至基準坐標系的現場轉換;建立一種關鍵點-CAD模型相融合的物體三維位姿在線實時測量方法,姿態解算速度達到70Hz,姿態解算誤差小于0.05°,研制出光學三維位姿在線監測系統軟硬件,從而為疲勞、靜載或動載試驗中飛行器三維位姿的在線、長時間監測提供技術與設備。
提出一種基于CPU-GPU異構計算的圓形非編碼標志點在線實時檢測技術,對于500萬分辨率的視頻圖像,標志點實時檢測速率達到100幀/秒、精度可達0.02個像素。(4)提出近景工業攝影測量與雙目立體視覺技術相結合的大型工程結構三維位姿在線監測技術,高效、準確、非接觸地獲取被測物體的三維姿態及軌跡等信息。
項目階段:
工程樣機

掃碼關注,查看更多科技成果
取消
確定