高等教育領域數字化綜合服務平臺






復旦大學
教育部
- 59 高校采購信息
- 104 科技成果項目
- 3 創新創業項目
- 0 高校項目需求
仿生雙目視覺系統


所屬領域:
項目成果/簡介:
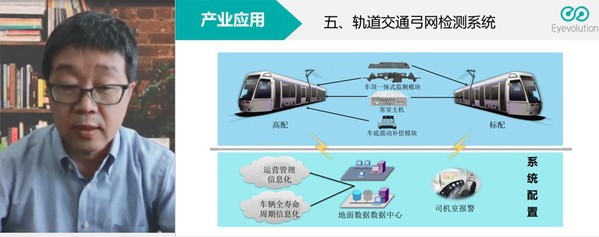
在仿生雙目視覺系統中,中科院上海微系統與信息技術研究所研究員張曉林團隊自主研發的自動監測及導航方案以仿生雙目視覺傳感器為主,IMU 等其他傳感器為輔,可同時接入多種其他輔助傳感器,與當前常見的激光導航方案相比,雙目視覺方案具有部署時間短、定位精度高、避障功能全、視覺數據豐富、成本大幅減少等優勢。目前該雙目視覺傳感器已經分別應用于上海地鐵的弓網檢測系統和半導體產線的自動晶圓搬運機器人。

掃碼關注,查看更多科技成果
取消
確定