高等教育領域數字化綜合服務平臺






浙江大學
教育部
- 223 高校采購信息
- 1316 科技成果項目
- 10 創新創業項目
- 0 高校項目需求
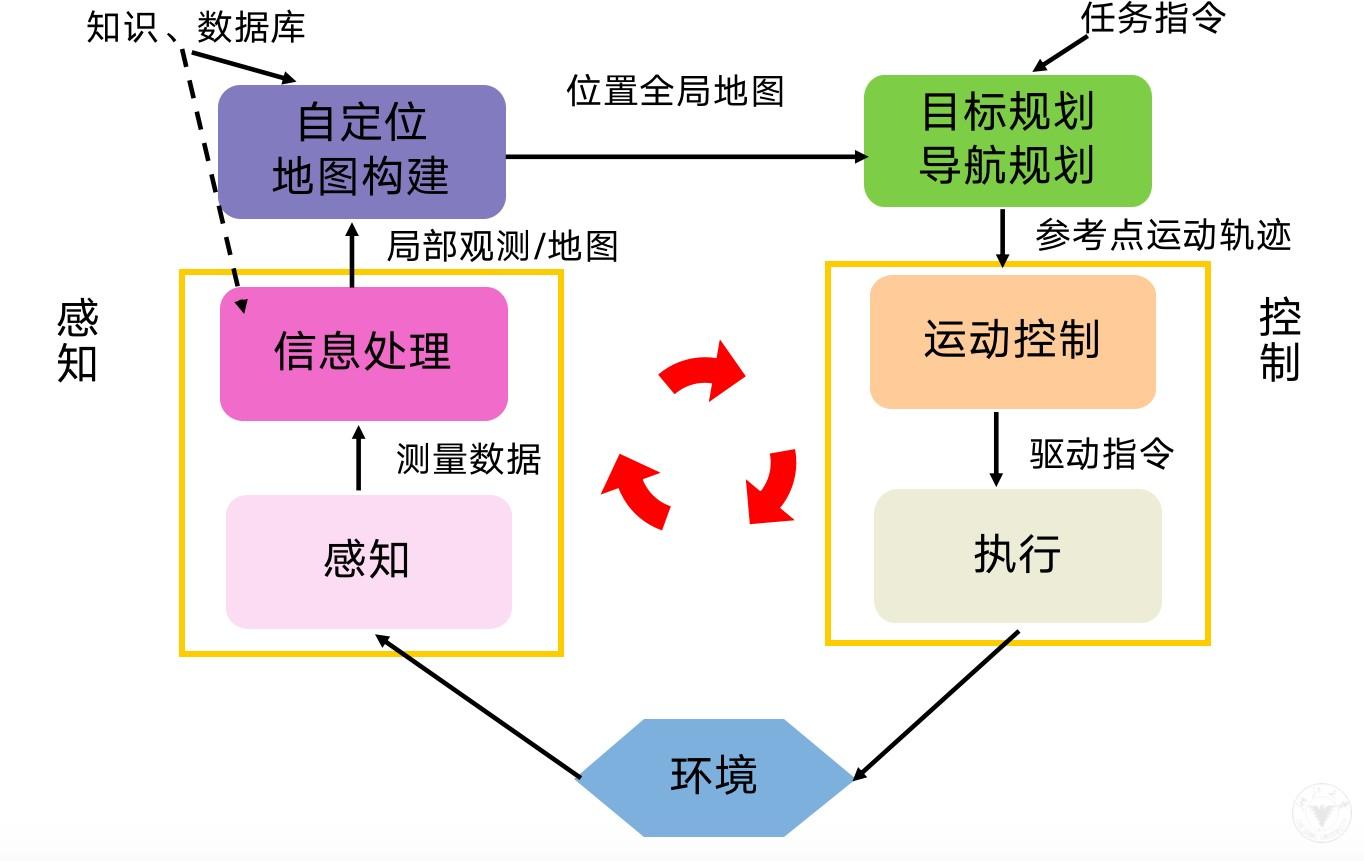
智能移動機器人


所屬領域:
項目成果/簡介:
在智能機器人領域迅速發展的背景下,移動型的機器人所展現出的智能化技術水平越來越高,這種機器人的應用范圍和功能作用也越來越多。技術人員在現有技術能力和水平的基礎上看到了智能機器人的巨大發展機遇和潛力,并開始潼憬和規劃未來的發展藍圖對技術研發和應用現狀也有了一個更為清醒的認識,并為將來智能化移動型機器人的發展不斷進行技術的創新和進步,也將展望未來人工智能的發展前景。
浙大團隊完成了傳感器的標定工作,并且提出了環視魚眼相機、輪速計陀螺儀融合方法,實現了基于環視相機和陀螺儀的融合估計;后完成了激光、相機、加速計和陀螺儀緊耦合的多傳感器融合的里程計框架,叫UC-Fusion;還完成了先驗激光地圖和相機、加速度計和陀螺儀所構成的定位系。
應用范圍:
智能制造
項目階段:
成熟

掃碼關注,查看更多科技成果
取消
確定