


|
北京理工大學(xué)
 搜 索
搜 索
搜 索
搜 索


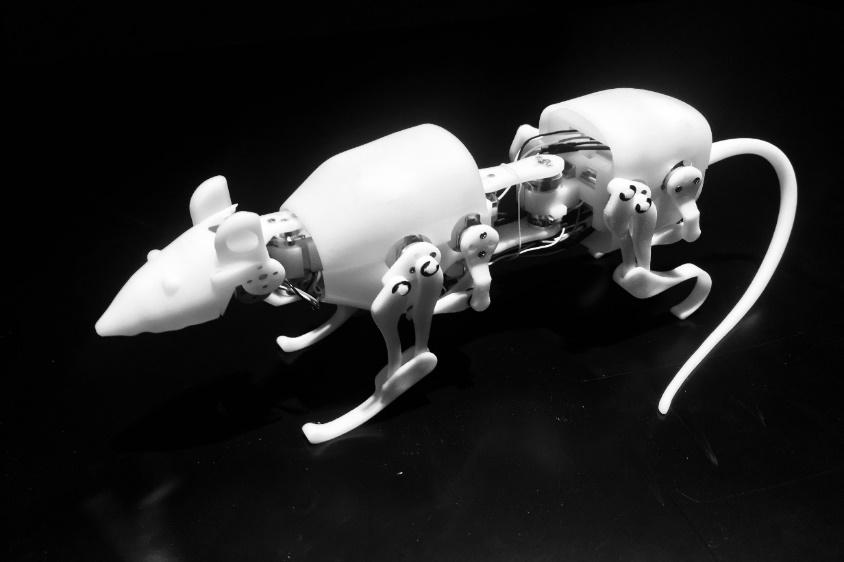
模仿動(dòng)物的仿生機(jī)器人為人類探索生命規(guī)律、解決相關(guān)科學(xué)問題提供了新方法和途徑,在管道檢測、地形偵察、家庭服務(wù)及教育等方面具備廣闊的應(yīng)用前景,已被列為各經(jīng)濟(jì)大國國家發(fā)展戰(zhàn)略的重要研究方向之一。現(xiàn)有仿生機(jī)器人研究取得長足進(jìn)步,但是在微小尺度內(nèi)實(shí)現(xiàn)多模態(tài)運(yùn)動(dòng)、多傳感器集成等方面存在諸多挑戰(zhàn)。鼠類兼具體型小巧、姿態(tài)多樣、適應(yīng)性強(qiáng)、社交復(fù)雜,為仿生機(jī)器人研究提供了很好的創(chuàng)新思路。本課題組以鼠類作為仿生對象,突破了微小型仿生機(jī)器人多關(guān)節(jié)靈巧設(shè)計(jì)與系統(tǒng)集成關(guān)鍵技術(shù),研制成功了集成度高、運(yùn)動(dòng)協(xié)調(diào)能力強(qiáng)的仿生機(jī)器鼠,機(jī)器鼠具有以下基本特點(diǎn):
1)在形態(tài)及尺寸(188×55×75 mm3)上十分接近真實(shí)鼠,擁有類似真實(shí)鼠的運(yùn)動(dòng)特征,具備12個(gè)主動(dòng)自由度,采用腿足結(jié)構(gòu),基于行走、小跑、雙足跳躍等步態(tài)控制,可以適應(yīng)多種復(fù)雜地形,實(shí)現(xiàn)從屈膝到站立、直行、扭轉(zhuǎn)、匍匐前進(jìn)等多種仿生運(yùn)動(dòng)模擬;
2)通過融合多種材料(硅膠、ABS樹脂)及現(xiàn)代加工方法(線切割、激光加工、MEMS)優(yōu)化機(jī)構(gòu)設(shè)計(jì),高度集成了控制、驅(qū)動(dòng)、無線通訊、感知等模塊,實(shí)現(xiàn)了系統(tǒng)設(shè)計(jì)的高度集成化、小型化、輕量化,所有模塊加在一塊總重量不超過250克;
4)結(jié)合視觸覺傳感系統(tǒng),研制出了rat-brain控制系統(tǒng),利用AI技術(shù)可識別當(dāng)下環(huán)境中的物體,感知觸碰物體表面的粗糙度及紋理特征,以及即時(shí)定位與地圖重建。利用無線通信技術(shù),在保證控制實(shí)時(shí)性的同時(shí),可通過多機(jī)器鼠集群控制實(shí)現(xiàn)大規(guī)模在線任務(wù)規(guī)劃。
電子寵物、教育培訓(xùn)、管道檢測、反恐偵查
小試

掃碼關(guān)注,查看更多科技成果

