高等教育領域數字化綜合服務平臺






上海交通大學
教育部
- 66 高校采購信息
- 215 科技成果項目
- 2 創新創業項目
- 0 高校項目需求
陸用慣性導航系統自動標定、運動對準及自主定位技術
2021-04-13 00:00:00
云上高博會
http://www.a00n.com
關鍵詞:
導航系統


所屬領域:
項目成果/簡介:
本技術涉及一種輪式車輛慣導系統的自動標定、運動對準即自主定位方法,即如何在不借助參考路標點和其他外部傳感器如GPS的條件下,實現實際路況下的慣導系統與車體間安裝關系和里程計標度因數的自動標定,以及車輛行駛中的慣導系統運動對準與自主定位,抑制環境因素對里程計輔助效果的影響,提升陸用車輛導航系統的自主性、快速性、可維護性、環境適應性和精度指標。
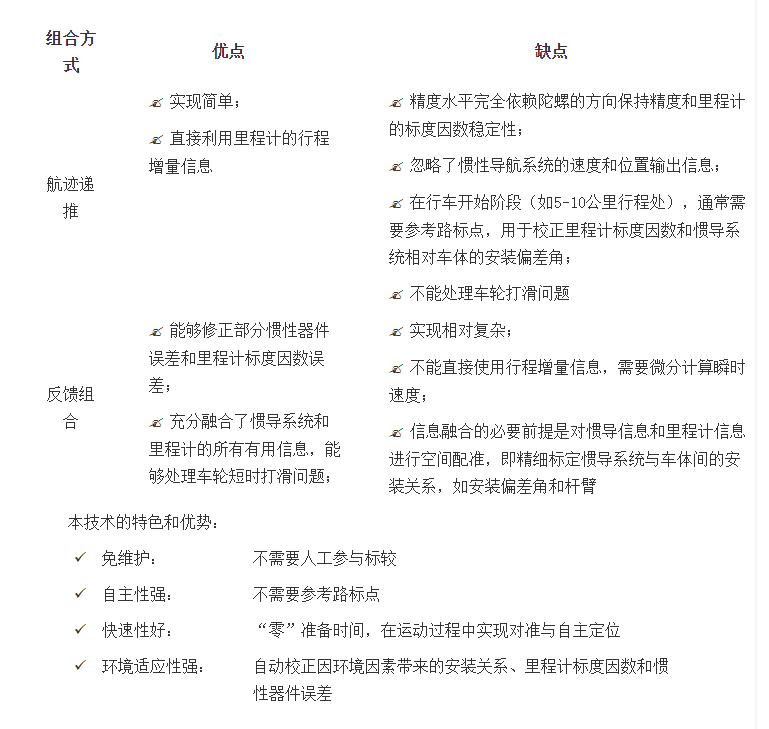
慣性/里程計組合導航系統通常采用兩種組合方式:航跡推算方式和反饋組合方式。航跡推算方式是一種簡單的次優組合,它以慣性導航系統提供姿態基準,以里程計提供行程增量并在參考坐標系中投影累加得到當前位置;反饋組合方式則將里程計輸出作為慣導系統的獨立外部觀測,反饋校正慣導系統的導航參數誤差以及部分慣性器件誤差,同時利用慣導系統的短期穩定性修正里程計標度因數誤差。下表給出了兩種組合方式的優缺點對比。反饋組合方式具有航跡推算方式所不具有的很多潛在優勢,如在信息空間配準的前提下,反饋組合方式能夠抑制環境因素對慣性器件精度和里程計精度的影響,如不依賴外部路標點實現慣性器件誤差和里程計標度因數誤差的自我修正,并緩解車輪的短時打滑問題等。
項目階段:

掃碼關注,查看更多科技成果
取消
確定