






圖1:無人機追捕實驗的軌跡圖(長時間曝光攝影)
微小型旋翼無人機已經被廣泛應用在我們生活生產的方方面面,包括航空攝影、電力巡線、環境監測、農業植保、科研教學等等。然而近些年無人機引起的安全事件也逐漸增多,比如無人機干擾機場等重要基礎設施,引起了社會廣泛關注,成為了亟待解決的重要問題。未來,隨著民用無人機行業的快速發展,將有更多的小型無人機應用于社會各方面,例如無人機物流、載人自動駕駛飛機等。屆時小型民用無人機的安全問題將會越發突出。
目前,針對“低小慢”無人機的防御技術主要依賴部署于地面的探測和反制設備。常見的技術手段包括遙控信號監測和干擾等。然而這些技術手段在有效性、應用場景等方面都有各自的局限性。[1]
“無人機追無人機”的技術可以通俗的概括為:看得見、定得準、跟得上。其中“看得見”主要是指安保無人機利用機載傳感器,例如視覺系統識別目標。“定得準”是指實時準確地估計并預測目標無人機的運動信息。“跟得上”是指能控制安保無人機與目標無人機保持合理相對位置和速度。
該研究重點關注了其中“定得準”和“跟得上”兩個問題,而“看得見”在研究團隊其它的工作中有詳細介紹[1-2]。
視覺的本質是一種能直接測量方向而不能直接測量距離的傳感方式,這是空中無人機追捕任務中最核心的挑戰。具體來說,當目標在圖像當中的中心點被確定之后,該目標相對于攝像頭的空間方向信息能夠通過相機內參計算得到,但是距離信息無法直接得到。關鍵距離信息的缺失將給目標運動估計構成基礎性的約束。
該研究的核心創新點在于將視覺感知的特點與目標運動估計和目標跟隨控制相結合,通過主動控制相機的空間運動來增強對目標信息的可觀性,從而實現“主動感知”。具體來說,研究團隊分析了三維空間當中傳感器多步可觀性增強的最優運動軌跡,從而能更準確地估計機動目標的運動信息。并在此理論基礎之上提出了一系列創新方法[1],包括偽線性卡爾曼濾波算法、新型螺旋制導算法等。

圖2:三維空間可觀性數值優化過程
這些算法的流程可以通過下圖展示。首先,機載攝像機識別目標無人機,獲得目標三維方向信息。第二,基于該方向信息,使用所提出的偽線性卡爾曼濾波器估計出目標的位置和速度。最后,使用新提出的螺旋制導律和底層無人機非線性控制器實現跟隨目標的任務。
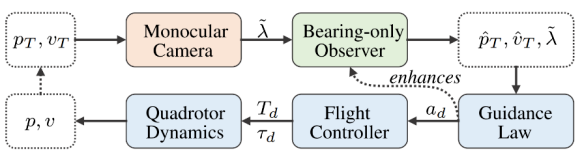
圖3:算法流程
為了驗證上述的各個算法模塊及整個系統,研究團隊基于DJI M300搭建了飛行實驗平臺。整套系統基于機器人操作系統(ROS)進行各個模塊之間的通訊。另外,他們還搭載了一塊板載計算機用于處理高層的狀態估計和導航控制的指令計算。


圖4:實驗平臺以及實驗場景圖

圖6:用于構建系統的軟件系統
大量實驗結果驗證了算法的有效性。在圖1中,研究團隊通過延時曝光的方法清晰看到目標無人機和安保無人機的軌跡。
該研究工作是空中無人機追捕方向邁出的重要一步,為接下來研發更高性能的算法和系統奠定了基礎。該工作受到了國家自然基金和杭州市重點研發計劃的支持。
參考論文
[1]Y.Zheng,Z.Chen,D.Lv,Z.Li,Z.Lan,and S.Zhao*,"Air-to-air visual detection of micro-UAVs:an experimental evaluation of deep learning",IEEE Robotics and Automation Letters,vol.6,no.2,pp.1020-1027,2021.
[2]Y.Zheng,C.Zheng,X.Zhang,F.Chen,Z.Chen,and S.Zhao*,"Detection,Localization,and Tracking of Multiple MAVs with Panoramic Stereo Camera Networks",IEEE Transactions on Automation Science and Engineering,accepted,May 2022.