





近日,我校機電工程學院孫立寧教授、楊湛教授課題組,哈爾濱工業大學謝暉教授課題組以及德國馬克斯普朗克智能系統研究所的Metin Sitti教授課題組,聯合研制出能自由穿梭在極端變化環境中的尺度可調控磁液滴機器人SMFR(圖一)。這種機器人不僅可以憑借優異的變形能力穿過狹窄的受限空間,還能在必要的條件下通過分裂或者融合的方式,實現自身尺度的按需調整,以適應極端環境和特定任務的變化。這項工作非常適合應用于靶向醫療相關領域,如靶向給藥,微型外科手術等。利用SMFR的可變形性和強大的尺度調控能力有助于提高其在體內受限環境中的適應能力和病變組織深處的可達性,最終實現人體內部運輸藥物、生物電子傳感器、微創醫療等應用,從而造福人類。論文以“Scale-reconfigurable miniature ferrofluidic robots for negotiating sharply variable spaces”為題發表在頂尖學術期刊《Science Advances》。
磁液滴機器人的尺度縮放原理
不同尺度的微機器人具有其獨特的應用場景,在不同的應用場景可能需要選用最為合適的機器人,才能提高應用的成功率。例如尺度更大的機器人執行能力越大,負載能力也有很大提升,但是隨著尺寸的增加,其在人體內的穿越能力急劇下降,因此難以觸及體內較深的病變組織;尺度小的機器人雖然執行能力弱,負載能力小,但是具有更靈活的運動性能,可穿越更小的組織間隙,因此有望到達人體內極深的組織環境。能夠在同一類機器人實現這兩種策略的巧妙結合,實現1+1>2的效果,是這項科研工作最為關注的問題。
受自然界中液滴行為的啟發,研究人員提出了基于磁流體液滴制備具有大變形能力的機器人的想法。磁流體的本質是具有磁性的四氧化三鐵納米顆粒分散在液體中形成的穩定流體,因此既具有很好的磁控性,又具有液體的流動性。通過在外部施加磁扭矩和磁梯度力,最終實現了磁流體液滴機器人的變形以及尺度可控切換。另一方面,受杠桿原理的啟發,研究人員還提出了一種新穎的磁杠桿機制,并據此設計了一個新型的復合式磁驅動系統M3RA(multiscale magnetic miniature robot actuation),該裝置集成了四個電磁體和一個球形永磁體,結構非常像中國傳統文化中的龍戲珠造型。該復合式磁控系統可以利用電磁體產生的微弱背景磁場,轉動永磁體產生的強大目標磁場。因此該系統可以為機器人提供強大的磁場梯度力和磁扭矩,可同時兼容微米到厘米尺度磁液滴機器人的運動控制,使得微型機器人的跨尺度控制成為可能。該系統結構非常緊湊,并且與傳統磁控線圈的封閉結構不同,M3RA具有典型的半開放式結構,能夠更好地貼近操作對象而不用將整個操作對象納入工作空間當中。
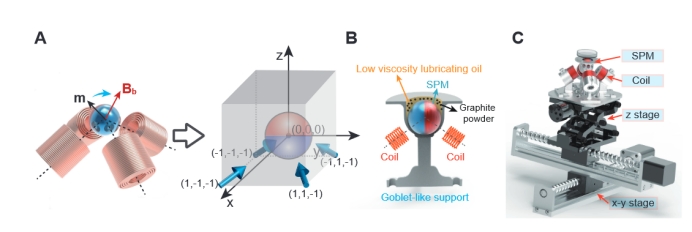
M3RA磁驅系統結構設計示意圖
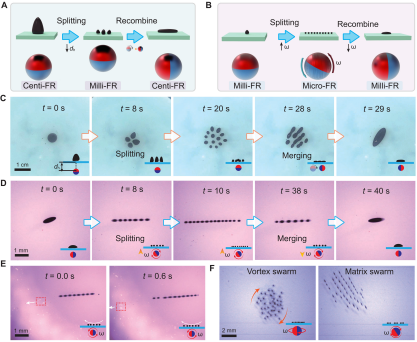
對于不同尺度的SMFR,研究人員有不同的控制策略。具體來說就是,對于微米尺度的SMFR,他們通過施加外部旋轉磁場,讓機器人滾動起來,這樣機器人就會類似一個旋轉的輪子能在基地上自由的滾動;對于厘米尺度SMFR,則采用磁梯度力拖拽的方式來控制機器人的運動,類似用磁體拖拽普通磁性物質,只不過在這里研究人員通過算法來實現機器人更高效率的運動控制。而對于毫米尺度的SMFR,他們則采取磁扭矩和磁梯度力結合的方式,以更高效的方式實現SMFR的運動控制。

SMFR跨尺度驅控原理和受限環境下的運動行為實驗
孫立寧教授表示,“SMFR的尺度調控則是通過液滴的分裂和融合實現的。通過在厘米尺度SMFR周圍施加較強的磁場使得SMFR每個部分相互排斥,再加上其流動性就會產生分裂的效果變成毫米尺度SMFR。此外,為進一步分裂毫米尺度SMFR,團隊還提出了基于旋轉磁場的分裂策略,可以使得毫米尺度SMFR進一步分裂成微米尺度SMFR。小尺度的SMFR縮放到大尺度更為容易一些,可以直接利用SMFR的液體特性通過融合的方式實現。通過以上方法,可以實現SFMR從大到小以及從小到大的可控調控。”
“我們致力于借助SFMR強大的變形能力和尺度自適應能力,將它應用到生物醫療應用中,通過在不同尺寸的組織間隙和人體腔道中自由航行,有望為實現體內靶向診療提供一種更高效有利的運載工具。”Metin Sitti教授總結道。
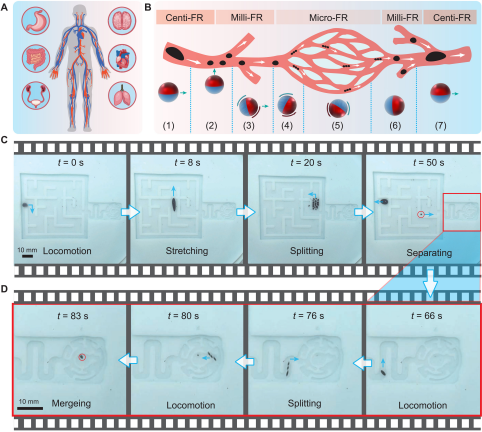
SMFR在活體劇變環境(模擬)下的運動控制、變形與尺度縮放
這款新型尺度可重構的磁液滴機器人是微型機器人技術和軟體機器人技術發展的重要里程碑。以前的研究工作主要關注固定尺寸的微型機器人,而沒有考慮機器人尺寸與所處環境的匹配關系,因此只有當這類機器人所處受限空間的橫截面尺寸與機器人的橫截面尺寸相當時才能產生有效的主動運動。未來研究工作將集中于與生物醫學相關的應用研究,例如基于SMFR的靶向藥物輸送、精確的局部磁熱療或腫瘤血管的選擇性閉塞等。