





軟體機器人能夠適應不同的非結構化環境,實現與人類更安全地交互。目前,軟機器人主要采用手工裝配工藝制造。制造方法的局限性導致生產困難,限制了材料選擇范圍,并且難以獲得復雜的驅動性能,更不用提賦予機器人感知能力或智能性了。相比之下,3D打印(增材制造技術)可以基于數字模型自動準確地將設計思想轉化為復雜零件,從而顯著提高生產效率和制造靈活性。因此,3D打印是制造軟體機器人的最佳選擇之一,因為它可以實現智能材料的精確加工,也就是4D打印技術。4D打印可以將智能材料加工成具有各種刺激響應行為的動態結構。除了簡單的變形外,具有感知能力和適應性的4D打印智能軟體機器人更具吸引力,也就是通常說的人工智能(AI, Artificial Intelligence)。而通過4D打印直接獲得智能軟體機器人仍然是一個巨大的挑戰。
示意圖
近日,天津大學材料學院封偉教授團隊報道了一種具備自主行動能力和觸覺應變的4D打印軟體機器人,該機器人在一次打印成型后即具有熱致無約束滾動能力,無需任何其他后續加工程序。機器人的滾動穩定有力,而速度和方向可通過改變形狀和尺寸進行調整。如圖1所示,當放置于160℃的熱臺上時,打印的矩形樣品變形為螺旋管狀,并在加熱板上自動開始滾動。調整樣品的大小可以改變機器人的滾動速度。而滾動的方向由螺旋管的曲率方向控制,可以輕松改變。
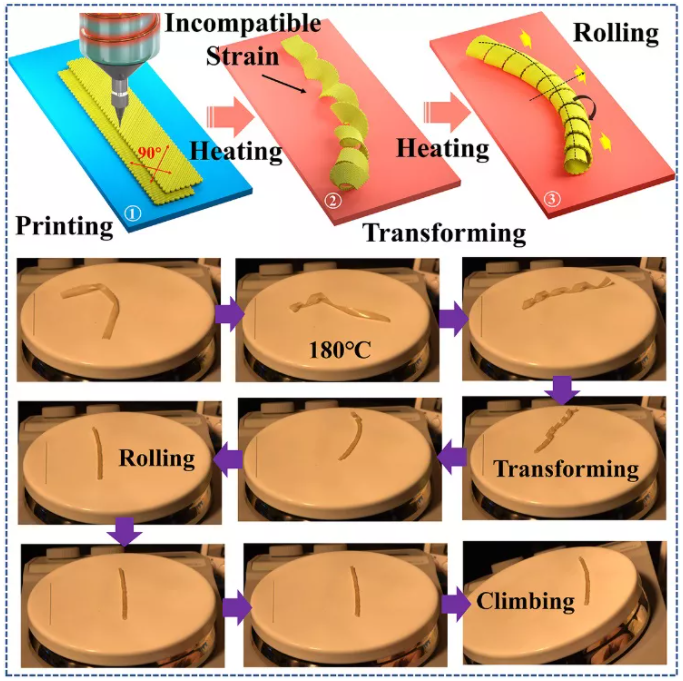
圖1. 4D打印軟體機器人自主變形及滾動過程。
圖2. 機器人自主滾動及爬坡過程。
如圖2所示,當加熱板水平時,樣品以約48 cm/min的速度朝其自身曲率方向滾動。當熱板右側被提起時,我們觀察到,盡管玻璃管已經落下,樣品仍沿著斜坡向上滾動。可以看到,管狀機器人的整個驅動過程是自動的,無需改變環境因素。相比之下,由于缺乏自主性,大多數報告的軟體機器人無法脫離主動控制。因此,這種機器人的一個重要特征就是自主驅動,使機器人能夠在脫離人工控制的情況下完成任務。得益于材料和結構的柔軟性,管狀機器人的無約束運動很容易被改變,如圖3A所示。較長樣本的滾動速度比較短樣本快,如圖3B展示了一場“短跑比賽”,其中10 cm長樣品的最大滾動速度可以達到48 cm/min,并可以從后面輕松地追趕上7 cm長的樣品。由于樣品顯示出一定的黏彈特性和相當大的滾動驅動力,當樣品以一定角度放置在傾斜的加熱板上時,樣品依然可以向上滾動(圖3D)。樣品的滾動速度隨著角度的增加而降低,并且樣品繼續保持在斜坡上,直到速度降低到0,然后掉落。如圖3E所示,由于驅動力較大,較長的樣品可以以較大的角度爬坡。這種攀爬能力使軟機器人能夠適應復雜的地形。
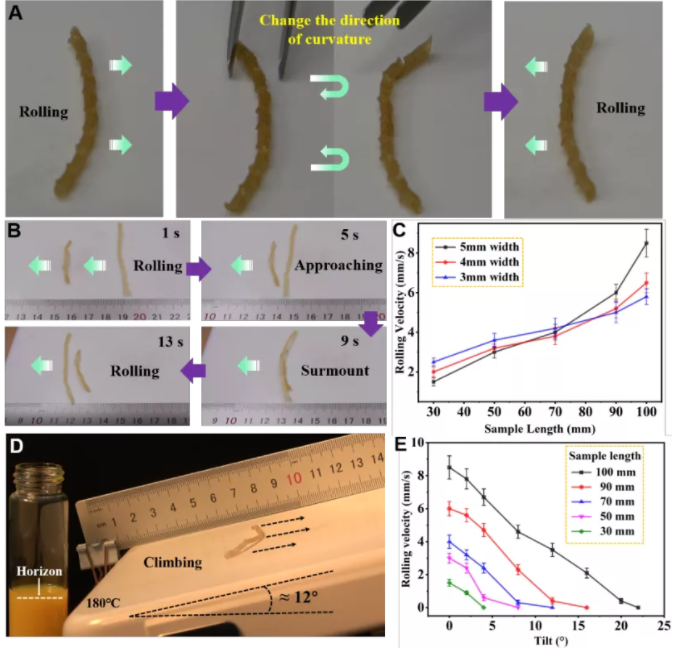
圖3. 4D打印軟體機器人的滾動運動特征。
機器感知是人工智能領域的一個重要方向。具有視覺、聽覺、觸覺和其他感知能力的機器人可以模擬和模仿人類行為。通常要實現人工智能,即使是最簡單的感知能力,也需要向機器人中集成各種復雜的元器件和傳感器。目前的軟體機器人,特別是由單種材料組成的軟體機器人,走向人工智能的道路依舊漫長而艱難。對于本研究中的軟體機器人而言,由于螺旋圓筒的曲率方向控制滾動方向的特性使得這種軟體機器人有類似昆蟲觸角的觸覺感知能力,其能夠探測前方道路上的障礙物,根據障礙物的高低實現翻越或折返,從行為學上體現了一定的智能性。而螺旋管的空心圓筒為貨物裝載提供了空間,其中裝載貨物的最大容量可達機器人重量的40倍。因此,該機器人可用于極端高溫條件下的貨物運輸和智能探測。

圖4. 翻越較低障礙。
圖5. 遇到較高障礙掉頭返回。
該成果在Cell 出版社旗下頂尖期刊Matter發表,題目為“4D Printed untethered self-propelling soft robot with tactile perception: rolling, racing, and exploring”。文章第一作者為天津大學材料學院博士研究生翟飛,封偉教授為本文通訊作者。近年來,封偉教授團隊在智能材料領域開展了一系列創新性研究工作。近期成果主要有(Mater. Horiz., 2021,8, 2475-2484; J. Mater. Chem. A, 2021,9, 875-883; Progress in Materials Science, 2021, 115, 100702; ACS Applied Materials & Interfaces, 2020, 12, 15657-15666;Adv. Mater., 2021, 2004754)等。