












PanoSim自動駕駛仿真測試軟件介紹
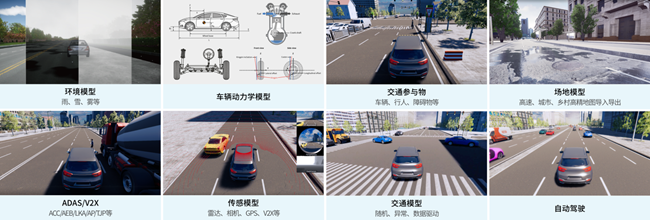
PanoSim是一款面向汽車自動駕駛技術與產(chǎn)品研發(fā)的一體化仿真與測試平臺,包括高精度車輛動力學模型、高逼真汽車行駛環(huán)境與交通模型、車載環(huán)境傳感器模型和豐富的測試場景等,以及面向汽車自動駕駛軟硬件開發(fā)的場景及交通流構建、車輛建模、環(huán)境傳感器構建、虛擬實驗臺、動畫與繪圖等系列工具鏈,具有很強的開放性與拓展性,支持第三方的二次定制化開發(fā),操作簡便友好。
(1)支持MIL/SIL/HIL/DIL/VIL多物理體在環(huán)仿真:提供各類I/O接口可便捷地接入各類實時處理器、控制器、傳感器、駕駛模擬器,以及包括車輛及其底盤和動力執(zhí)行機構在內的各類軟硬件系統(tǒng),以滿足自動駕駛研發(fā)在不同階段、不同環(huán)節(jié)的實時仿真需求;
(2)支持ADAS/V2X和自動駕駛仿真開發(fā)與測試:支持包括汽車自適應巡航(ACC)、自動緊急制動(AEB)、車道保持輔助(LKA)、自動泊車(AP)、交通擁堵輔助(TJP)等在內的高級駕駛輔助系統(tǒng)(ADAS),以及其它自動駕駛技術與產(chǎn)品的仿真開發(fā)與測試;
(3)支持駕駛模擬體驗、人機交互與人機共駕:支持高逼真度的駕駛體驗,包括不同道路、交通和天氣環(huán)境下的駕駛體驗,ADAS功能和自動駕駛系統(tǒng)體驗,支持人機交互與人機共駕系統(tǒng)的研發(fā)與測試等;
(4)支持自動駕駛感知/決策/規(guī)劃/控制算法開發(fā):集高逼真度道路與環(huán)境模型、交通流與智能體模型、傳感器模型、車輛動力學模型等于一體,支持自動駕駛感知與決策、規(guī)劃與控制等算法開發(fā)、模型訓練和測試要求;
(5)支持多節(jié)點、分布式實時仿真:通過高逼真實時環(huán)境渲染、高精度傳感器模型、分布式實時仿真架構、高算力、真實數(shù)據(jù)接口模擬等支持車輛真實EE架構下包括相機、超聲波雷達、毫米波雷達、激光雷達等在內的多傳感器分布式機群模擬,以及數(shù)據(jù)處理器、運動控制器、駕駛模擬器等在環(huán)的自動駕駛算法開發(fā)與測試;
(6)支持數(shù)字孿生測試與高并發(fā)云仿真: 支持虛擬環(huán)境下的道路、交通與氣象模型,環(huán)境傳感器模型等與真實世界車輛和車載軟硬件系統(tǒng)的數(shù)字孿生測試;支持基于云平臺的人-車-路-環(huán)境信息融合、云端一體高并發(fā)實時仿真;支持云平臺下的實時在線學習與模型訓練、自動駕駛算法的高效迭代與仿真測試等(以上系統(tǒng)功能見圖3)。
