











產(chǎn)品詳細(xì)介紹Prescan自動駕駛仿真軟件
一、簡介
PreScan是德國Seimens西門子公司旗下汽車自動駕駛仿真軟件產(chǎn)品,Prescan是以物理模型為基礎(chǔ),開發(fā)ADAS和智能汽車系統(tǒng)的自動駕駛仿真平臺。支持?jǐn)z像頭、雷達(dá)、激光雷達(dá)、GPS,以及V2V/V2I車車通訊等多種應(yīng)用功能的開發(fā)應(yīng)用。 PreScan基于MATLAB仿真平臺,主要用于(ADAS)汽車高級駕駛輔助系統(tǒng)和無人自動駕駛系統(tǒng)的仿真模擬軟件,其包括多種基于雷達(dá),攝像頭,激光雷達(dá),GPS,V2V和V2I車輛/車路通訊技術(shù)的智能駕駛應(yīng)用。支持模型在環(huán)(MIL),實(shí)時軟件在環(huán)(SiL),硬件在環(huán)(HiL)等多種使用模式。北京津發(fā)科技股份有限公司作為德國Siemens西門子公司正式簽約合作伙伴,旨在進(jìn)一步加深雙方商業(yè)、技術(shù)合作,開辟新市場,為無人駕駛領(lǐng)域貢獻(xiàn)積極力量。
二、軟件概覽
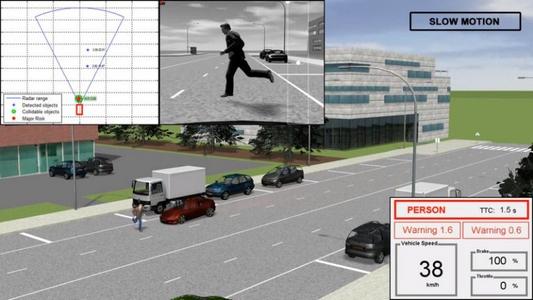
智能汽車自動駕駛仿真系統(tǒng)在PreScan中的仿真實(shí)現(xiàn)如下圖所示。
智能駕駛仿真實(shí)現(xiàn) 特點(diǎn)
1. 場景工況 交通要素?cái)?shù)據(jù)庫
快速場景構(gòu)建
Euro NCAP ×11
NHTSA ×12
ISO ×19
ADAC ×9
eValue ×4
Opendrive importer
OSM importer
IBEO importer
GIDAS/CIDAS importer
2. 傳感器&通訊 19種傳感器類型包括
Mono camera
Stereo camera
Fisheye camera
Radar
Lidar
Ultrasonic
Antenna
Radio
DSRC V2X
Lane marker sensor
Object sensor
Depth sensor
3. Matlab Simulink 基于Matlab Simulink平臺
4. 執(zhí)行器&人機(jī)界面 車輛動力學(xué)模型
PreScan model
Coupling to 3rd party model
AMESim
LMS Virtual.Lab Motion
CarSim
………
三、詳細(xì)功能
軟件詳細(xì)功能 特點(diǎn)描述
交通場景建模型 ●Roads 道路模型
●Database of road types 道路數(shù)據(jù)庫
●Environment 環(huán)境模型
●Road users 道路使用者
●Weather & Lights 天氣光照
傳感器模型 ●Camera, fisheye, mono, stereo
攝像頭、魚眼、單目及雙目攝像頭
●Radar 毫米波雷達(dá)
●Laser and lidar 激光雷達(dá)
●Ultrasonic 超聲波雷達(dá)
●V2X sensors 車車/車路通訊傳感器
●Ground truth sensors 真值傳感器
●Ground truth Sensor 真值傳感器
ADAS algorithm implementation 控制算法仿真集成 ●Model in the Loop 模型在環(huán)
通過MatLab/Simulink平臺,可以引入各種編程工具開發(fā)的算法代碼。
●Hardware in the Loop 硬件在環(huán)
也可以直接引入ECU硬件,構(gòu)成硬件在環(huán)試驗(yàn)臺
Driver model駕駛員模型 ●根據(jù)理想路徑以及車輛當(dāng)前位置計(jì)算車輛轉(zhuǎn)角信號輸出。
●根據(jù)理想速度以及車輛當(dāng)前速度計(jì)算油門、剎車信號。不再遵循原先定義的路徑。
●Driver in the loop 駕駛員在環(huán)
Vehicle actuation modelling
車輛執(zhí)行器建模 ●2D bicycle dynamics model 2D動力學(xué)模型
●3D two track dynamics model 3D動力學(xué)模型
●6DOF sprung body à x, y, z, roll, pitch, yaw 六自由度車輛狀態(tài)計(jì)算
●Usage: on PreScan’s 3D roads (i.e. roads with a height profile) 適用PreScan 3D路面仿真
●3rd party dynamics model import 外部車輛動力學(xué)模型導(dǎo)入
Test Automation (TA) 自動化測試 ●Select variables (GUI) 選擇自動化測試參數(shù)
●Set-up variables (MATLAB) 使用模板編寫自動化測試腳本
●Run test automation script (MATLAB) 運(yùn)行腳本
●Compare results (MATLAB) 獲得自動化測試報(bào)告
Demos ●PreScan標(biāo)準(zhǔn)安裝包自帶128 個demo場景,所有的場景模型以及系統(tǒng)控制算法完全對用戶 開放
●PreScan標(biāo)準(zhǔn)安裝包自帶19個智能駕駛系統(tǒng)傳感器
●PreScan標(biāo)準(zhǔn)安裝包自帶30多個智能控制算法模型,所有系統(tǒng)控制算法完全對用戶開放、可編輯修改
●PreScan標(biāo)準(zhǔn)安裝包自帶43個交通道路參與者及執(zhí)行器,并支持導(dǎo)入用戶自定義的第三方3D模型
●PreScan標(biāo)準(zhǔn)安裝包自帶134個ADAS仿真系統(tǒng)模型,這些案例所含的場景模型、系統(tǒng)控制算法、執(zhí)行器模型完全對用戶開放
功能插件 ●大規(guī)模交通流自動生成器
●IBEO掃描數(shù)據(jù)自動轉(zhuǎn)換為PreScan仿真場景
●IBEO掃描數(shù)據(jù)自動轉(zhuǎn)換為PreScan仿真場景
●攝像頭物理模型
●基于統(tǒng)計(jì)學(xué)性能的雷達(dá)模型
●GIDAS事故數(shù)據(jù)庫自動導(dǎo)入PreScan仿真場景
●升級版車車通訊傳感器模型
●PreScan和PTV Vissim軟件耦合計(jì)算
四、應(yīng)用案例
1.MCity使用PreScan驗(yàn)證測試場設(shè)計(jì)
2.車道保持系統(tǒng)硬件在環(huán)(HIL)測試平臺
3.自動駕駛系統(tǒng)硬件在環(huán)(HIL)測試平臺
4.自適應(yīng)巡航/自動緊急制動系統(tǒng)ViL測試平臺
5.基于Nvidia PX的人工智能硬件在環(huán)測試平臺
一、簡介
PreScan是德國Seimens西門子公司旗下汽車自動駕駛仿真軟件產(chǎn)品,Prescan是以物理模型為基礎(chǔ),開發(fā)ADAS和智能汽車系統(tǒng)的自動駕駛仿真平臺。支持?jǐn)z像頭、雷達(dá)、激光雷達(dá)、GPS,以及V2V/V2I車車通訊等多種應(yīng)用功能的開發(fā)應(yīng)用。 PreScan基于MATLAB仿真平臺,主要用于(ADAS)汽車高級駕駛輔助系統(tǒng)和無人自動駕駛系統(tǒng)的仿真模擬軟件,其包括多種基于雷達(dá),攝像頭,激光雷達(dá),GPS,V2V和V2I車輛/車路通訊技術(shù)的智能駕駛應(yīng)用。支持模型在環(huán)(MIL),實(shí)時軟件在環(huán)(SiL),硬件在環(huán)(HiL)等多種使用模式。北京津發(fā)科技股份有限公司作為德國Siemens西門子公司正式簽約合作伙伴,旨在進(jìn)一步加深雙方商業(yè)、技術(shù)合作,開辟新市場,為無人駕駛領(lǐng)域貢獻(xiàn)積極力量。
二、軟件概覽
智能汽車自動駕駛仿真系統(tǒng)在PreScan中的仿真實(shí)現(xiàn)如下圖所示。
智能駕駛仿真實(shí)現(xiàn) 特點(diǎn)
1. 場景工況 交通要素?cái)?shù)據(jù)庫
快速場景構(gòu)建
Euro NCAP ×11
NHTSA ×12
ISO ×19
ADAC ×9
eValue ×4
Opendrive importer
OSM importer
IBEO importer
GIDAS/CIDAS importer
2. 傳感器&通訊 19種傳感器類型包括
Mono camera
Stereo camera
Fisheye camera
Radar
Lidar
Ultrasonic
Antenna
Radio
DSRC V2X
Lane marker sensor
Object sensor
Depth sensor
3. Matlab Simulink 基于Matlab Simulink平臺
4. 執(zhí)行器&人機(jī)界面 車輛動力學(xué)模型
PreScan model
Coupling to 3rd party model
AMESim
LMS Virtual.Lab Motion
CarSim
………
三、詳細(xì)功能
軟件詳細(xì)功能 特點(diǎn)描述
交通場景建模型 ●Roads 道路模型
●Database of road types 道路數(shù)據(jù)庫
●Environment 環(huán)境模型
●Road users 道路使用者
●Weather & Lights 天氣光照
傳感器模型 ●Camera, fisheye, mono, stereo
攝像頭、魚眼、單目及雙目攝像頭
●Radar 毫米波雷達(dá)
●Laser and lidar 激光雷達(dá)
●Ultrasonic 超聲波雷達(dá)
●V2X sensors 車車/車路通訊傳感器
●Ground truth sensors 真值傳感器
●Ground truth Sensor 真值傳感器
ADAS algorithm implementation 控制算法仿真集成 ●Model in the Loop 模型在環(huán)
通過MatLab/Simulink平臺,可以引入各種編程工具開發(fā)的算法代碼。
●Hardware in the Loop 硬件在環(huán)
也可以直接引入ECU硬件,構(gòu)成硬件在環(huán)試驗(yàn)臺
Driver model駕駛員模型 ●根據(jù)理想路徑以及車輛當(dāng)前位置計(jì)算車輛轉(zhuǎn)角信號輸出。
●根據(jù)理想速度以及車輛當(dāng)前速度計(jì)算油門、剎車信號。不再遵循原先定義的路徑。
●Driver in the loop 駕駛員在環(huán)
Vehicle actuation modelling
車輛執(zhí)行器建模 ●2D bicycle dynamics model 2D動力學(xué)模型
●3D two track dynamics model 3D動力學(xué)模型
●6DOF sprung body à x, y, z, roll, pitch, yaw 六自由度車輛狀態(tài)計(jì)算
●Usage: on PreScan’s 3D roads (i.e. roads with a height profile) 適用PreScan 3D路面仿真
●3rd party dynamics model import 外部車輛動力學(xué)模型導(dǎo)入
Test Automation (TA) 自動化測試 ●Select variables (GUI) 選擇自動化測試參數(shù)
●Set-up variables (MATLAB) 使用模板編寫自動化測試腳本
●Run test automation script (MATLAB) 運(yùn)行腳本
●Compare results (MATLAB) 獲得自動化測試報(bào)告
Demos ●PreScan標(biāo)準(zhǔn)安裝包自帶128 個demo場景,所有的場景模型以及系統(tǒng)控制算法完全對用戶 開放
●PreScan標(biāo)準(zhǔn)安裝包自帶19個智能駕駛系統(tǒng)傳感器
●PreScan標(biāo)準(zhǔn)安裝包自帶30多個智能控制算法模型,所有系統(tǒng)控制算法完全對用戶開放、可編輯修改
●PreScan標(biāo)準(zhǔn)安裝包自帶43個交通道路參與者及執(zhí)行器,并支持導(dǎo)入用戶自定義的第三方3D模型
●PreScan標(biāo)準(zhǔn)安裝包自帶134個ADAS仿真系統(tǒng)模型,這些案例所含的場景模型、系統(tǒng)控制算法、執(zhí)行器模型完全對用戶開放
功能插件 ●大規(guī)模交通流自動生成器
●IBEO掃描數(shù)據(jù)自動轉(zhuǎn)換為PreScan仿真場景
●IBEO掃描數(shù)據(jù)自動轉(zhuǎn)換為PreScan仿真場景
●攝像頭物理模型
●基于統(tǒng)計(jì)學(xué)性能的雷達(dá)模型
●GIDAS事故數(shù)據(jù)庫自動導(dǎo)入PreScan仿真場景
●升級版車車通訊傳感器模型
●PreScan和PTV Vissim軟件耦合計(jì)算
四、應(yīng)用案例
1.MCity使用PreScan驗(yàn)證測試場設(shè)計(jì)
2.車道保持系統(tǒng)硬件在環(huán)(HIL)測試平臺
3.自動駕駛系統(tǒng)硬件在環(huán)(HIL)測試平臺
4.自適應(yīng)巡航/自動緊急制動系統(tǒng)ViL測試平臺
5.基于Nvidia PX的人工智能硬件在環(huán)測試平臺